
The Vision: Precision Agriculture
Built originally for the prestigious e-Yantra robotics programming competition—where it successfully advanced all the way to the semi-finals—AGRIBOT is an autonomous crop-harvesting prototype engineered to revolutionise farming efficiency and reduce manual labour bottlenecks.
The innovation embedded in this system stretches far beyond a standard academic prototype; the core methodologies, logic systems, and architectural design have been formally patented and published across recognized scientific research papers.
Autonomous Navigation & Scanning
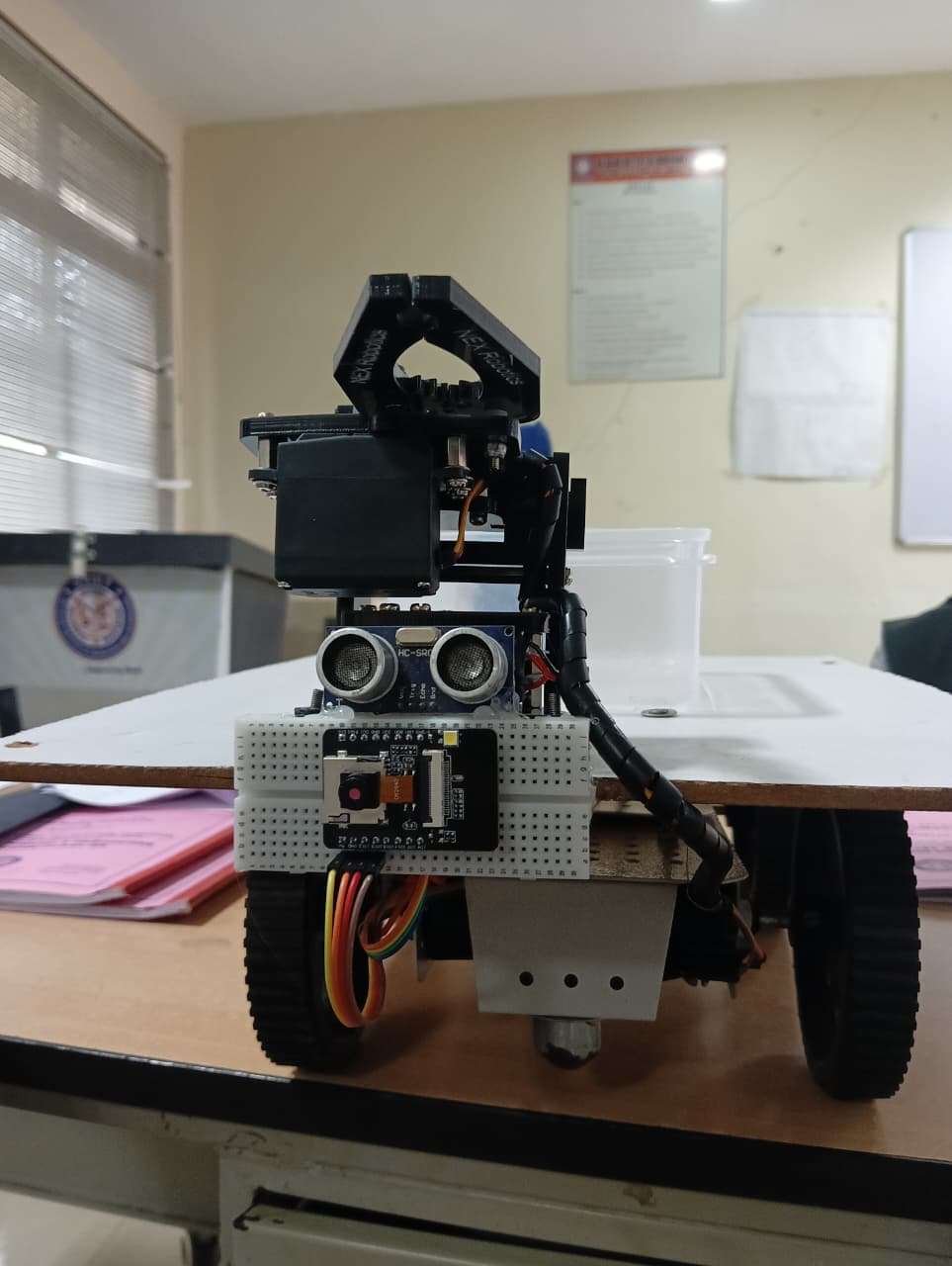
At the foundational edge of AGRIBOT is an intelligent, reactive navigation loop. The robot initiates a continuous forward motion, traversing meticulously through designated crop rows.
Whenever its forward-facing ultrasonic sensors detect an obstacle or identify a potential harvest target, the mobility chassis executes a hard halt, pausing completely for a strictly timed 10-second operational window.
During this crucial 10-second interval, a servo-mounted mechanism engages and sweeps the localized area. Fastened directly to the servo shaft is an ESP32-CAM module, which actively scans its immediate surroundings and captures high-resolution, focused images of the target fruit before the robot resumes traversal.

Machine Learning & Cloud Processing
The onboard electromechanics represent only the edge-computing fraction of the equation. Once the images are captured by the ESP32-CAM, they are instantaneously transmitted over a dedicated wireless network to our custom-built web infrastructure.
Operating server-side on this central site is a highly optimized Machine Learning (ML) computer vision model, pre-trained on extensive datasets of fruit morphology and ripeness gradients.
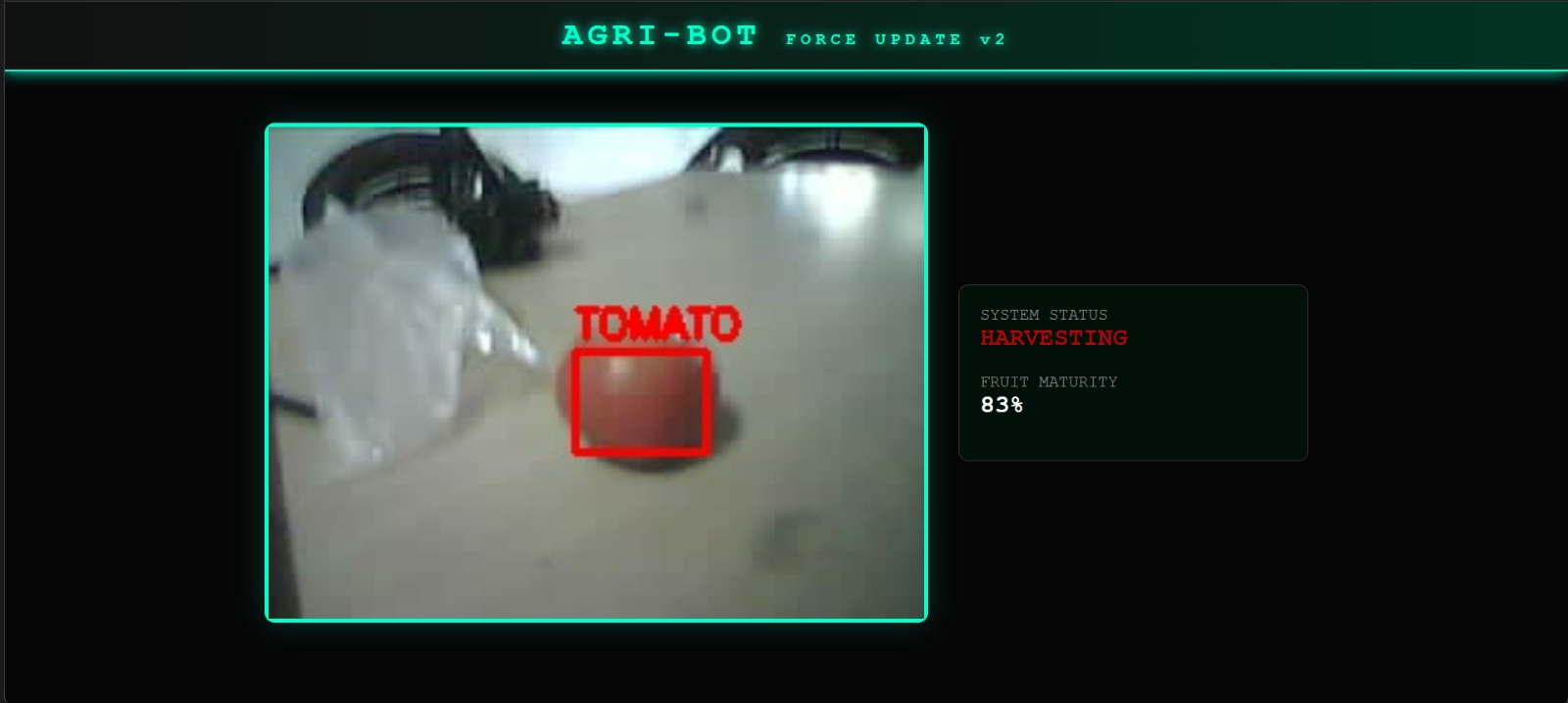
The ML model processes the incoming optical data in real-time. As corroborated by the system dashboard above, the model confidently parses a target (e.g., a tomato), overlays a detection bounding box, computing an exact ripeness maturity percentage (such as 83%).
Actionable Output: The Harvest
Data without execution provides little value. AGRIBOT closes the loop by acting on a purely deterministic logic gate: If the calculated ripeness percentage exceeds the 70% threshold, the system triggers the custom-built robotic actuation arm. The arm extends with precision, seamlessly plucks the mature crop from the stem without bruising or damaging it, and safely deposits it into the onboard collection bin.
Architectural Highlights
- Hybrid Stack: Seamlessly synchronizes physical edge hardware (Ultrasonic grids, ESP32 microcontrollers, Servos, Chassis DC Motors) with complex software layers (Cloud Web App, ML Vision Models).
- Latency Optimization: Operates inside stringent 10-second halting intervals to process and compute heavy imagery efficiently without halting agricultural traversal grids.
- Academic Acclaim: Heavily vetted prototype culminating in successful e-Yantra competition runs, official patent grants, and published technical literature.